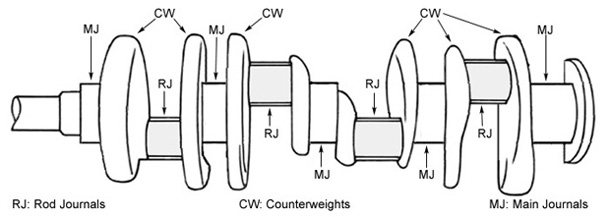
Crankshaft balancing is the term commonly used to describe changes made in the “counterweights” of the crankshaft (and other components in some cases) to compensate for the weights of the moving components including the crankshaft and the components attached to it (connecting rods, pistons, etc.). The counterweights are wedge or disc-shaped cylindrical sections positioned laterally in between the crank throws (each throw includes two connecting rod journals, generally in a continuous machined surface), and positioned rotationally opposite the throws (180° away) to “counter-act the weight” of the journals, rods, pistons etc. The counterweights are cast or forged in place when the crankshaft is formed, and the balance process is done by removing metal from the counterweights (usually by drilling holes) until their total is correct to compensate for the engine components.
It is necessary for any engine’s crankshaft to be in balance to operate without damage.
All crankshafts are balanced at the factory, but not to the same degree as would be required for racing, or even by a careful owner. The factory balance is only production-line quality, and can be improved upon by diligent effort. In a “V” engine (V-2, V-4, V-6, V-8, V-10) this is especially important, as these engines are inherently out of balance due to the irregular nature of the firing impulses, and movement of the components.
V-8 engines are almost always balanced to a 50% factor.
This means that the amount of “extra” (not structurally necessary) weight carried by the counterweights (and other non-radially-symmetrical weights on the crankshaft including
the harmonic balancer and flex plate, if the engine is externally balanced,
such as the Mopar 360 and cast-crank B & RB, 454 BBC, 400 SBC, 289 SBF, etc.) is equal to:
100% of the rotating weight + 50% of the reciprocating weight
The 50% factor has proven itself over a long period of time as providing reasonable freedom from vibration, excellent component durability, and acceptable passenger comfort. However, it is not, and cannot be completely successful in compensating for the weight of the internal reciprocating components, as I will attempt to explain.
The purpose of this Paper is not to explain how engines are balanced, but to discuss in part why balancing is not easily accomplished, and to explore why even the most accurate balancing job is only partially effective.
Balance Weight Placement
Internal balance In an internally balanced engine, the extra weight for both balance and inertia purposes is contained completely in the counterweights.
Ideally, each counterweight should carry the imbalance of its adjacent journal and rod: a total of eight weights @ 12.5% of the total balance weight each on a V8 two-plane crankshaft. However, not all internally balanced engines have the compensating weights adjacent to the components they’re adjusting for; many have no center counterweights - all the balancing is on the outer weights. Early Chrysler hemis only have six weights, which leaves the weakest center area with heavily eccentric weight. Their proven racing history suggests that (although theoretically inferior) this method is fully effective, if the component design and strength are sufficient.
Each crank throw is eccentric weight, even if perfectly balanced (since the balance factor is never 100%). Even those with fully counter-weighted cranks don’t have all the out-of-balance forces self-compensated, since (usually) 50% of the reciprocating weight is left out. This means that there will be
some bending and flexing caused by the rotation of the eccentric weight as the crank rotates normally.
The “balance factor” is at best a compromise, and partially suppresses vibration at some RPM and power/vacuum levels. Pictured here is a crankshaft with no center counterweights. Click the picture for a larger view.
External balance An externally balanced engine is one in which the counterweights are not heavy enough to fully compensate for, and therefore balance, the engine components, so (in addition to the usual eccentric counterweights) the missing fraction must be re-located to outside the engine block. An additional eccentric weight is attached to the damper, flexplate, flywheel, etc. at either or both end(s) of the crankshaft. Even though on paper the total of the balance weights is correct, the out-of-balance forces (engine components) are corrected by opposing forces (balance weights) as much as one foot away from them. This means that the crankshaft is subject to bending forces from both directions all the time, even when the engine is in a favorable RPM range (where the 50% factor is most effective).
One method of correcting this, and converting an externally-balanced engine to internal balance, is to remove some metal from the counterweights, and substitute a cylindrical slug of a much heavier metal. The substance of choice is “Mallory metal”, an alloy of tungsten [chemical symbol: W]; “Densalloy” is another.
The key is the relative density of the “slug” material vs. the steel or iron it replaces. Mallory metal is approximately 2-1/3 times as heavy as steel, so every piece removed from the counterweight and replaced with Mallory metal adds 1-1/3 of the weight of the substituted piece (e.g.: remove 120 grams of steel by drilling, fill the hole with Mallory metal, the Mallory metal slug weighs 280 grams, so the weight added is 160 grams. If enough steel is removed and replaced with Mallory metal, the counterweights will now be sufficient to balance the components without added eccentric weight outside the engine block. However, Mallory metal is extremely expensive.
A much less expensive, but more labor-intensive, substitute is lead [chemical symbol: Pb] or (for those who believe in taking risks) mercury [chemical symbol: Hg]. However, it’s highly toxic. Lead is much heavier than steel, but not as heavy as Mallory metal, therefore a larger volume of lead must be substituted for steel or iron in the crankshaft.
For example, if the equivalent lead weight would have to be 75% more volume than Mallory metal to make up the same imbalance: if 4 slugs 1/2” × 1” of Mallory metal were used, you’d need 7 slugs of lead, etc.
Component Definitions
The entire crankshaft assembly must balanced (with the exception of certain rotating components marked* in the list below). For this illustration, we’ll assume that the engine in question is independently (internally) balanced; this means that all compensation for the weights mentioned above is made to the crankshaft
itself, rather than to external components. The classic calculation requires dividing the engine’s crankshaft and related components into the two separate categories: rotating weight” and reciprocating weight”.
Rotating weight: » the crankshaft
» the oil mass of any hollow passages in the crankshaft
» the rod bearings (+ locating dowels, if any)
» the lower half of the connecting rod(s), including the caps & screws
» * any radially-symmetrical accessories attached to the crankshaft
directly, but external to the
crankcase (cam drive sprocket, harmonic damper, pulley,
flex plate, flywheel, fasteners, etc.),
that are inherently zero-balanced, and have no intentionally eccentric weight distribution
Reciprocating weight: » the pistons & piston components, including the pins, rings &
locks (+ piston pin bushings, if any)
» the upper half of the connecting rods (except the piston pin bushings, if
any)
However, a closer analysis of the components quickly shows that there are actually three categories, not two: pure rotating weight, pure reciprocating weight, and hybrid weight.
Classifying the connecting rod’s
upper and lower halves as reciprocating or rotating is not completely
accurate. The rod’s pin eye does reciprocate, but the rod’s absolute upper
end (including the material closing the top of the eye), and the rod beam
between the pin eye and the crankshaft’s rod journal follow different and more
complex paths. The rod’s big end does rotate, but only the imaginary line
marking the contact with the crankshaft’s rod journal is pure rotation,
the rod’s big end actually oscillates as well.
Let’s define pure rotating motion as
motion which exactly follows the position of an imaginary point on the
circumference of a circle, the diameter of which is the stroke length".
These components never come to a complete halt while the crankshaft is rotating and never change direction. They vary speed directly proportionate to crankshaft RPM.
Let’s define pure reciprocating motion as bi-directional linear motion; accelerating from fully stopped @ TDC, traveling down, slowing &
stopping @ BDC, then reversing and accelerating in the other direction,
slowing & stopping, etc.. These components come to a complete
halttwice in every crankshaft revolution. The speed of each cycle varies
in direct proportion to crankshaft RPM. The speed at different points in each cycle varies with the ratio of the connecting rod length to the stroke length, and crankshaft position; their direction reverses twice (up to down) during each crankshaft revolution:
at TDC (0°) and BDC (180°).
Let’s define hybrid motion as motion varying in speed with the component’s position along the rod’s length as well as engine RPM, but varying in direction based on crankshaft position: no lateral movement @ TDC or BDC. Its movement is in the same direction as the crankshaft, and has highest velocity when the rod’s beam axis is @ 90° to the crankshaft throw, which will occur between roughly 72° and 78° from TDC, depending on the rod ratio (not 90° from TDC).
Pure rotating weight » the crankshaft, etc. as described above
» the connecting rod bearings & dowels (if any)
Pure reciprocating weight » the piston(s) & piston components, including pins, rings &
locks (+ piston pin bushings, if any)
Hybrid weight » the connecting rod beam
The Rod Path
Material closest to the center
of the piston pin almost mimics the piston pin - its movement is
reciprocating plus a small oscillation back & forth. Its path is a long,
narrow irregular semi-ellipse with the minor diameter equal to the
amplitude (span) of oscillation, and the major diameter equal to the stroke
length (see #1 in the illustration below; the actual elliptical path would be irregular,
and asymmetrical re motion away from TDC vs. BDC). Points farther down the rod’s beam
and closer to the big end (see #2-4) have greater amplitudes of oscillations
(minor diameter) added to the stroke length (major diameter), again forming
an elliptical path, but of greater circumference and more regular shape.
The maximum oscillation is a function of
the rod’s maximum angle of inclination to the bore axis, about 13 -
20° in most cases; this is determined by the rod to stroke ratio
(longer rods = smaller angle). The outer limit of oscillation is therefore
an isoceles triangle, with the apex at the piston pin centerline, and
the 2 equal-length arms diverging off downward at twice the rod inclination
angle (26 - 40°). The width of the triangle’s base is the maximum oscillation
span or amplitude (the minor diameter of the ellipse), which is determined
by the triangle’s height, a function of the placement along the rod’s
beam axis of the point in question.
The beam closest to the piston pin (see
#2) has an minor diameter amplitude almost equal to zero, plus a major diameter equal to the stroke length - almost a straight line.
The beam closest to the rod journal (see #5) has an minor diameter amplitude almost equal to the stroke length laterally, plus a major diameter equal to the stroke length - almost a perfect circle.
This means that the shape of the movement of each gram of weight, the speed of motion, and the distance traveled per revolution of the crankshaft all partially depend on its exact position along the rod’s beam axis, as well as the rod to stroke ratio, and the absolute length of the rod centers.
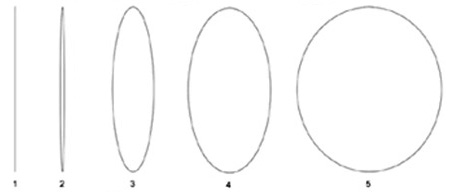
In the illustration (below, right), the motion of several points on the rod’s beam are depicted. Each point would travel the circumference of the shape shown during one rotation of the crankshaft, arriving back at the top @ TDC each time.
#1 shows the motion of a point
on the rod’s beam axis centered in the pin eye - the motion is completely
reciprocating. The major diameter for all ellipses shown is the stroke length (here shown at 4.00), but since there is no oscillation there is therefore no rotation, and the minor diameter (the width) of the ellipse is 0 - the shape is a straight line.
#2 shows a point slightly below point #1 along the rod’s beam axis. The minor diameter is about .10”, representing a small back & forth oscillation.
#3 shows a point below point #2 along the rod’s beam axis. The minor diameter is about 1.00", representing a larger back & forth oscillation.
#4 shows a point slightly below this point along the rod’s beam axis. The minor diameter is about 2.00”, representing a path with much more rotating motion.
#5 shows a point almost at the big end of the rod, just
above the upper rod bearing. Here, the minor diameter is almost the stroke’s full length of 4”.
The next logical step down the rod’s beam axis would, of course, be pure rotating weight, forming an ellipse with the minor and major diameters at stroke length - a circle, the exact path of the crankshaft’s rod journal.
Rod Length and Ratio
All methods involve separating the rod weight into reciprocating weight vs. rotating weight by suspension of the rod(s) by one end and weighing the other, carefully keeping the beam axis exactly horizontal. The process is then reversed, giving the weight of the opposite end. The total (of course) equals the exact weight of the rod.
However... this makes the separation of reciprocating vs. rotating weights dependent on the center of gravity , which is NOT a relevant factor for
balancing purposes. The exact center of the rod journal is pure rotating weight (no rectilinear motion), whereas the pin eye is pure reciprocating weight (no rotational motion). If you stretched a rod by 1 in the exact balance center (without adding
any weight), the suspension-derived weight & proportions would not change, but clearly the effect of the new rod on balance would change, because the point of distinction between the reciprocating and rotating ends is at the geometric center, not the center of gravity, which has nothing to do with predicting what effect a specific molecule in the rod is doing, and how best to compensate for it.
The position on a rod beam that has exactly 1/2 of the characteristics of each is located at the geometric center - because the center of gravity A giant chunk of lead hanging off the rod bolt will certainly change the rotating end quite a bit, but according to the “classic” model it also changes the reciprocating weight, and reciprocating weight percentage, because it moves the C-of-G. Since the big end is always much heavier than the small end, the center of gravity will only begin to locate at the geometric center (50% of the center to center distance) in a rod of infinite length; shorter rods will tend to have more bias between the C-of-G and geometric center.
Therefore, the absolute length of the rod (as well as the rod ratio) has an effect on balance.
This (partially) explains why some factors work better on some engines. Motors with higher n values (long rod, short stroke, rod-to-stroke ratio in the 1.75 - 2.1-1 range, thrust angle 13-16°) have lower out-of-balance forces: the mostly linear upper
end of the beam walks back and forth through a smaller range, and its maximum angle from vertical is smaller. Lower n value engines’ (short rod, long stroke, rod-to-stroke ratio in the 1.45 - 1.75-1 range, thrust angle 17-20°) rod beams swing through a greater arc as the maximum deflection from vertical is greater - more of the force is vectored at the cylinder wall (rather than at the crank throw). This affects selection of balance factor. In my opinion, the separation (and assignment of weight fractions to rotating vs. reciprocating) MUST include some compensation for the length of the rod (as well as the rod to stroke ratio). An interesting experiment would be to see where the mathematical center is (50% of center-to-center distance; approximately 3.38 from either end of an RB 413, 426W or 440
rod) vis-a-vis the balance point derived by the C-of-G (suspended) method.
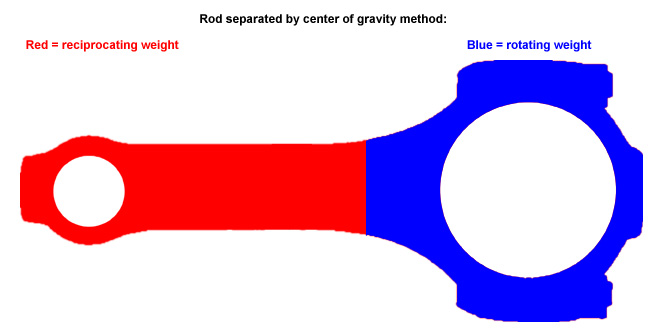
Here is a rod drawn as if the cross-section were of continuous thickness. Of course, this is never true; however it makes analysis and comparison easier so please bear with me (click either rod for a larger view). Let’s make the rod weight 500 grams to simplify the math.
The upper rod (shown, right) has been accurately divided at its center of gravity (using Martin Hepperle’s excellent “A. C. Calculator” program). The red (reciprocating) weight is 46.6% of the total rod weight, or 233 grams. The blue (rotating) weight is 53.4%, or 267 grams. The bob weight for this method based on a 50% factor is: (233 × 50%) + 267 = 383.5 grams.
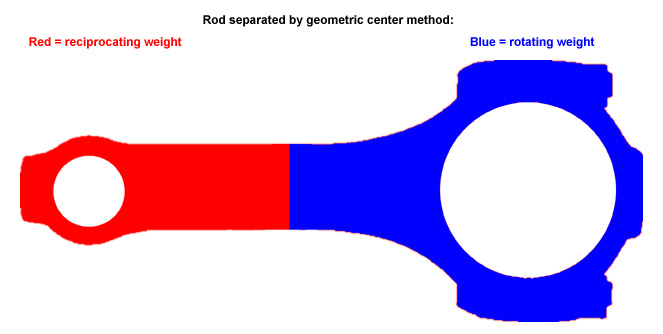
The lower rod (shown, right) has been divided geometrically from the center of the pin eye to the center of the big end. The red (reciprocating) weight is 34.8% of the total rod weight or 174 grams. The blue (rotating) weight is 65.2%, or 326 grams. The bob weight for this method based on a 50% factor is: (174 × 50%) + 326 = 413 grams.
The center of gravity method assigns 236 grams more to the bob weight total: 413 - 383.5 = 29.5 × 2 rods per journal × 4 journals. If each bob weight (for one journal) is 2,000 grams, this is a change of almost 3%.
What may we surmise from this? If the geometric center method is more accurate in compensating for reciprocating weight (as I suspect), why does it appear to use a factor less than 50%? There are several possible reasons.
The dynamic forces are far more important than suspected.
The 50% factor is not accurate since it has been de-constructed backwards from an incorrect assignment of reciprocating weight in the rod beam.
The 50% factor may contain another error: the factor for pure reciprocating weight (piston, &c.) may be very different from that for hybrid weight (rod beam), but in opposite directions.
I suspect that a separate factor should be applied to hybrid weight, since it follows a path determined by rod geometry (rather than a pure shape or vector). If so, the factor may vary inversely with some function of the rod:stroke ratio, since a rod of infinite length converts all hybrid weight to reciprocating weight, and a rod length equal to the journal offset (1/2 stroke) is nearly tracking the journal during some part of the event.
Geometric center rod weight determination for balancing
The “suspension” method assigns weight to small end vs. big end based on center of gravity; if you hung the rod in mid-air by a thread, and gently lowered it on 2 scales, the only point of suspension where it would hang horizontally is at the CG. If you tried to suspend it at the geometric center (50% of center distance) the results would be very different; the big end is always much heavier.
To weigh each end based on the geometric center: find and accurately mark the center point with a sharpie, etc. Build/find a waterproof container (C#1) 6” deep, 4” × 4” across, with upper walls exactly square & horizontal. Build/find a 2nd larger waterproof container (C#2) 2” deep, 6” × 6” across. Weigh C#2 on a gram scale and record. Place C1 with the upper edges exactly level in C2. Fill C#1 exactly to the top with clean water. Suspend the rod from the pin eye so that the beam is exactly vertical. Very slowly submerge the rod in C#1 up to the marked centerline.
If Archimedes was right, the water overflow volume is exactly equal to the volume of the submerged rod mass. Set C#1 & the rod aside. Weigh C#2, and subtract the empty weight. The remainder is the weight of the water in grams (water: 1 cc = 1 ml = 1 gm; isn't the metric system wonderful?). Multiply by the specific gravity of steel (approximately 7.93 as “rolled steel”) to get the actual 50% geometric-center derived weight of the rod's big end. If curious, do the other end the same way. If not curious, just subtract your result from the total weight.
Factors Affecting Balance
Although 50% balance factor is the
default on V-8 engines, engines run at high speeds frequently have extra
weight added, raising the factor to over 50%. There have been many formulae
published to calculate the exact amount of adjustment to make to the
crankshaft to compensate for these factors. The adjustment is usually
made by removing metal from the counterweight or cheek directly opposite
the center of an imbalance caused by excess weight. Of course, it’s also
possible to add weight, but this is more complex and not generally the first
choice. If a known and trusted balance factor (math formula or selection
of components) is used, the level of component reliability and passenger
comfort is improved. However, even excellent application of the wrong factor
may cause very unsatisfactory results - don’t be creative! Actually,
no formula is correct, some just come closer than others, by the
empirical method - they’ve been tried & adjusted by experiment.
All formulae are compromises based on engine details, but
also including such dimensional & physical factors as:
» Rod to stroke length ratio: small ratios (long stroke, short rod)
have higher out-of-balance forces.
» Angle between the cylinders: V-8 engines generally have the cylinder
banks placed 90° apart, but this is certainly not the only practical
method. The V angle is usually a whole fraction of a circle, and (usually)
takes into account the number of cylinders: 45° is 1/8 of a full
circle, 60° is 1/6, 90° is 1/4, etc. Large aircraft radial engines
were designed with 27 cylinders: 9 banks of 3 in-line cylinders each,
40° apart.
» RPM range normally used: a wide range must be more forgiving of
bad spots. The calculation must be made for the entire range, not
just the power curve (except for racing).
» Amount of power developed: if necessary, the durability of the
engine is given preference to the driver’s comfort.
» Tolerance of vibration: how long will the machine be driven? By
whom?
» Type of engine mount: solid? rubber? how many points of attachment?
Mathematical-based formulae using
only conventional factors will never predict accurately how
well a given engine will run, even at a given RPM, because the dynamic
forces aren’t limited to reciprocating vs. rotating weight. The forces
acting on the rod & crank-pin (mass inertia) are not only the reciprocating
weight (as listed above), but also the forces present in the cylinder
and combustion chamber above the piston. This Paper brings to the reader’s
attention how complex the subject is, and cautions them to research
the subject very carefully before balancing their engine.
Over-balancing and under-balancing This method has been recommended for high RPM engines. However, the “50% factor” has no mathematical or theoretical basis - it’s “what works”.
It fails to account for the fact that almost all of the rod’s small end is not pure reciprocating weight, that material above the pin center is traveling opposite the rod beam, that the difference in forces between long and short rods is completely absent, and that other very large forces (cylinder compression pressure, combustion, exhaust pumping, and vacuum) are completely ignored.
De-constructing over and/or under-balancing to justify an observed result is not science, it’s rationalizing.
Dynamic factors; motion vs. direction The reciprocating components of a
V configuration behave quite differently from those of an single-cylinder,
in-line or opposed (180°) engine. Using the standard V-8 90°
engine for example, let’s begin about mid-stroke (120° BTDC) with
both pistons on a single crank throw (but on opposite cylinder banks)
rising towards TDC. Both pistons (and the other reciprocating components,
as listed previously) are moving in the same direction (even though
not at the same speeds). However, as the left bank piston reaches 90°
BTDC the right bank piston has stopped at TDC. As the
left bank piston reaches 91°, the right bank piston is at 1°
ATDC (relative), and has begun to move down . The two pistons
will continue to move in opposite directions for 90°, until the
left bank piston reaches TDC, after which both pistons will be moving
down.
A similar effect occurs approaching &
passing BDC. The relative directions of the pistons is the same, but
the exact positions are different due to the difference in piston speed
at the bottom of the stroke (the TDC motion vs. BDC motion speed differential
and exact piston position are functions of the rod-to-stroke ratio).
Only at 45° from TDC and BDC are the 2 pistons on the same crank throw
in the same absolute position.
From left bank piston position 90°
BTDC to TDC and 90° BBDC to BDC, the left and right bank pistons
are moving in opposite directions. The selection of the V angle itself
adds another complex factor to engine design. The narrow V angles (60°,
etc.) have a relatively short period in which the reciprocating
weights of the two cylinders are moving in different directions - the
same as the V angle (60° is only 16.67% of the full 360° rotation
of the crankshaft). However, the out of balance forces are relatively
high, and balancing is generally successful only over a narrow range of
engine speed. As the V angle widens (90°, etc.) the periods in which
the reciprocating weights are moving in different directions increases
(90° is 25% of the full rotation of the crankshaft), which appears to
make the problem worse, but the wider V angle engines appear more tolerant
of wider and higher RPM ranges, and the net effect is an improvement. However,
these engines generally require a wider engine bay for clearance,
as the banks are spread apart. This is one of the positive factors favoring
a V-6 - it’s not only shorter (by 1 cylinder and crank throw) than a V-8
with the same bore & stroke, but using the common 60° bank separation
angle it’s also substantially narrower across the cylinder banks (but slightly taller top to bottom).
In addition, the material in the rod’s pin eye (small end) above the center of the piston pin, as well as the rod bearing cap, are always oscillating in the opposite direction from the rod beam (except at TDC & BDC, of course). Although minimal in their effect, they are part of the rod’s “swing” (oscillating) inertia, but reduce and modify the effects of the rod beam’s weight. This “overhang” weight is currently not factored into any balance formula or equation.
The bottom line is that the physics and mathematics involved in how the engine operates are far too complex to make a formula-based balance factor any more than
a reasonable compromise. These are only the factors that I’ve personally detected, there are almost certainly more (of greater or lesser effect). Once the factor has been selected, the remaining tasks are accurately to record the component weights, and precisely adjust the crankshaft to compensate. Your engine will last longer and be more pleasant
to operate afterwards.
My opinion: any engine that is out & apart should be balanced wherever practical. Only give this work to a shop of proven reputation and competence. Don’t try to be an innovator in selecting a balance factor; use one that has stood
the test of time & experience: 50%. If you wish to experiment, pattern yours after an engine very similar to yours (especially with regard to stroke & rod length, piston gram weight, operating RPM range, and compression ratio).